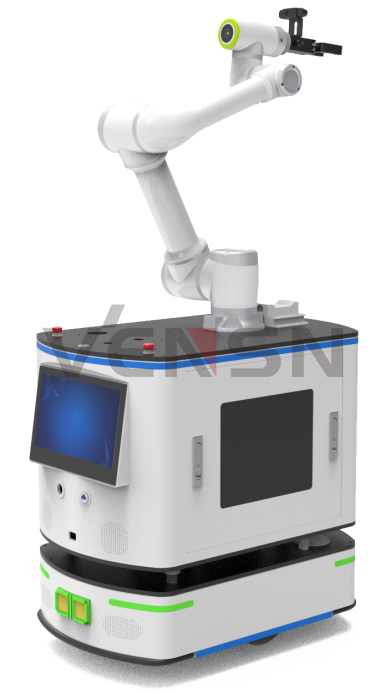
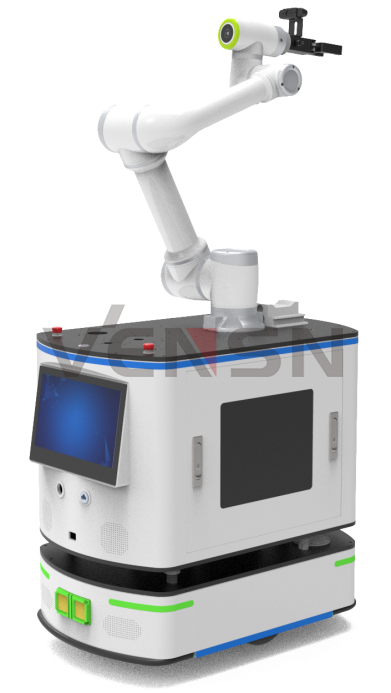
一、产品概述
该产品以一台高精度移动机器人为载体,通过拓展上层结构,集成了协作机器人、视觉系统、传感器等设备,并部署高性能运算单元,为机器人的应用提供统一的通讯接口和算力支持。本产品与复合型移动协作机器人(室内版)的区别在于,具备极高的控制精度和稳定性,其运动精度达到了±5mm,负载超过150kg,完全满足各类智能制造、车间协作、室内巡检等复杂场景的应用需求。
二、产品功能与特点
1.高精度
移动机器人底盘采用工业级控制器,运动精度可达±5mm,远超当前大多数ROS移动机器人的精度水平。
2.大负载
底盘可提供超过150kg的负载能力,顶部协作机器人负载5kg,支持更换其他负载的机器人,满足不同场景的应用需求。
3.地图构建与导航
配备核心的地图构建和定位导航功能,机体内部预留丰富的上层机构扩展接口,可快速帮助用户实现移动机器人的各种应用。
4.深度视觉引导
在机器人末端安装深度相机,可与移动机器人、协作机器人联动,到达指定位置后,完成对场景的拍摄,定位物体坐标,并引导机器人执行抓取动作。
5.适用于多种复杂场景
依靠超高的运动定位精度和大负载,设备可开展车间协作、室内巡检、无人配送等各类应用,满足各类严苛的环境要求。
三、主要硬件参数
1.全向移动底盘
全向移动底盘即一台移动机器人,采用激光雷达进行地图构建,支持自主建图、定位与导航。底盘硬件结构采用开放式设计,预留多个USB接口、网口以及I0端口,可支持多种外设的拓展和应用实践。
2.协作机器人
采用节卡C5协作机器人,该型机器人专注末端负载为5kg以下的3C领域自动化作业,可应用于3C、金属加工、食品、医药、科研培训、物流等行业,实现上下料、装配、锁螺丝、喷涂、打磨、焊接等应用。说明:可根据用户实际需要更换为其他机器人。
3.深度视觉系统
深度视觉系统采用1台200万像素深度体感摄像头,安装于协作机器人末端,用于目标的精确定位与机器人引导。摄像头可兼容ubuntu,linux和树莓派等操作系统,采用sony IMX179 CMOS芯片,兼容USB3.0接口协议,可进行深度信息感知、活体识别等。摄像头内置立体深度算法,可实现更准确的深度感知及更远的范围。通过校准,立体深度感知的误差率低至1%,在室内和室外环境中均可捕获相距达10米的数据。
4.运算单元
采用工业级结构,体积小巧,外形紧凑,安装windows10系统,集成C++、OpenCV等运行环境,支持数字图像处理、机器视觉、机器人等硬件或应用的开发和学习。
四、科研应用
本产品融合了移动机器人、协作机器人、深度视觉等多种前沿技术,可完成以下科研应用:
(1)移动机器人控制与路径规划;
(2)协作机器人与视觉系统标定;
(3)深度学习与深度视觉的应用;
(4)深度视觉引导机器人进行物体抓取;
(5)多机器人协同与调度。








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: