一、产品概述
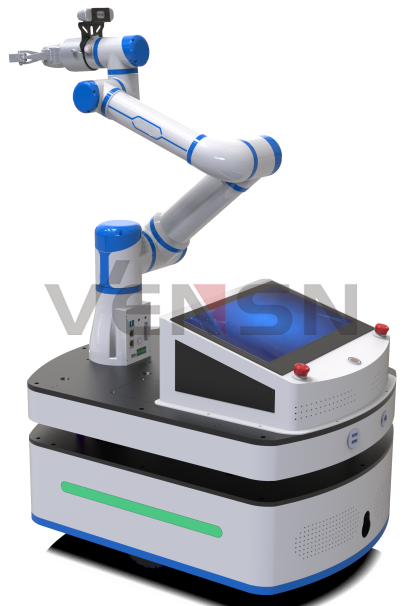
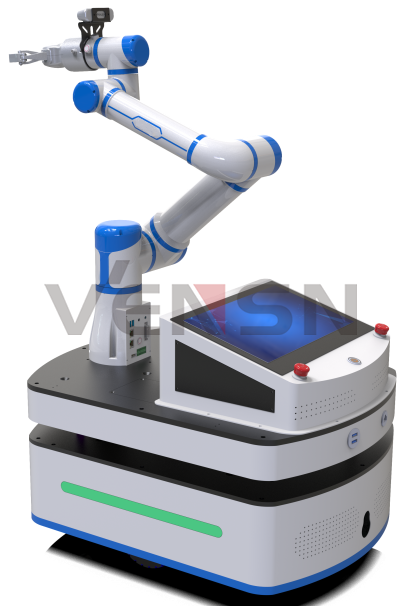
复合型移动协作机器人由移动机器人、协作机器人组合而成,采用激光 SLAM 导航,结合陀螺仪、IMU、里程计等多种传感器融合算法,具有自主定位、路径规划和移动抓取等功能。机器人通过在协作机器人末端搭载深度视觉系统,可实现对环境信息的三维感知,并引导协作机器人进行不同类型物体的准确抓取,或与用户进行人机交互与协作。产品可应用于智能制造、现代农业、无人商超、智能家居等多种场景。
二、产品功能与特点
1.多场景通用
复合机器人同时具备移动机器人和协作机器人的功能,极大的拓展了协作机器人的运动空间,满足车间、农业、商超、家居等多种场景下的作业要求。
2.基于深度视觉的物体抓取
深度相机除了可识别物体的外观特征外,还可以判断物体的形状和姿态,从而调整手臂末端夹爪的角度,以最合适的方位,对物体进行准确抓取。
3.深度学习与目标识别
在车载处理单元中部署深度学习算法,实现对目标的自主学习和识别。同时,通过对深度相机的点云图像进行分析,可判断目标的位姿,实现对多种异型物体的自适应抓取;
4.语音呼叫机器人
机器人顶部平台安装声源定位麦克风,在与车载处理单元的交互下,可实现声场的空间特性采样,从而引导机器人根据声音的方位执行指定动作,如自动向声音的发出方向运动,并在运动中实时避障。
三、主要硬件参数
1.全向移动底盘
全向移动底盘即一台移动机器人,采用激光雷达进行地图构建,支持自主建图、定位与导航。底盘硬件结构采用开放式设计,预留多个USB接口、网口以及I0端口,可支持多种外设的拓展和应用实践。
2.协作机器人
协作机器人采用六轴协作机器人,可满足用户不同自由度的需求。协作机器人总重量15KG,有效负载达3KG,工作半径达680mm,可适应各种复合应用场景。
协作机器人内置安全模块,触碰停止,实现人机安全协作。末端具备通用接口,灵活扩展,即插即用,满足多行业应用需求扩展。开放API函数库,支持C/C++编程语言,支持Windows/Linux/ROS机器人操作系统及多种通讯协议。
另外,机器人控制器内置于底座中,不仅大幅压缩了协作机器人整体体积,而且极大了方便了各类应用场景的搭建,用户无需额外考虑控制器的安装空间,节省调试时间与成本。
3.深度视觉系统
深度视觉系统采用1台200万像素深度体感摄像头,安装于协作机器人末端,用于目标的精确定位与协作机器人引导。摄像头可兼容ubuntu,linux和树莓派等操作系统,兼容USB3.0接口协议,可进行深度信息感知、活体识别等。摄像头内置立体深度算法,可实现更准确的深度感知及更远的范围。通过校准,立体深度感知的误差率低至2%,在室内和室外环境中最远可捕获相距达10米的数据。
4.语音识别单元
采用可编程式麦克风阵列模块,支持声音识别、声源定位等功能。麦克风阵列是由一定数目的声学传感器(麦克风)组成,可用来对声场的空间特性进行采样并处理的系统。由于在复杂的声学环境下,噪声与语音信号在时间和频谱上常常是相互交叠的,再加上回波和混响的影响,利用单麦克风捕捉相对纯净的语音非常困难,而麦克风阵列融合了语音信号的空时信息,可以同时提取声源并抑制噪声。
5.车载处理单元
车载处理单元采用体积小巧,外形紧凑的嵌入式计算机,预装Linux操作系统,集成Python、OpenCV等运行环境,以及产品运行所需的全部软件框架和SDK,支持2D视觉、深度视觉、移动机器人、协作机器人等硬件或应用的开发和学习。
四、课程资源
1、ROS机器人操作系统
2、移动机器人运动控制
3、协作机器人运动控制
4、机器视觉与图像处理
5、深度视觉
6、语音识别
7、复合机器人应用实践案例








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: