一、产品概述
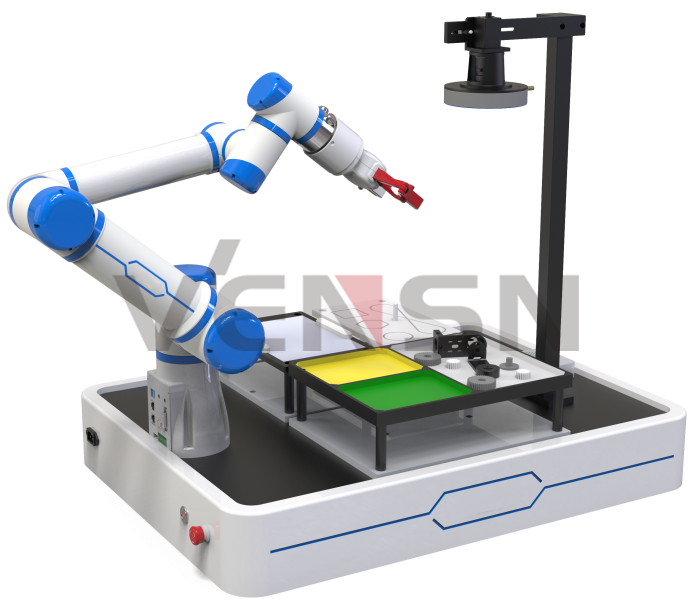
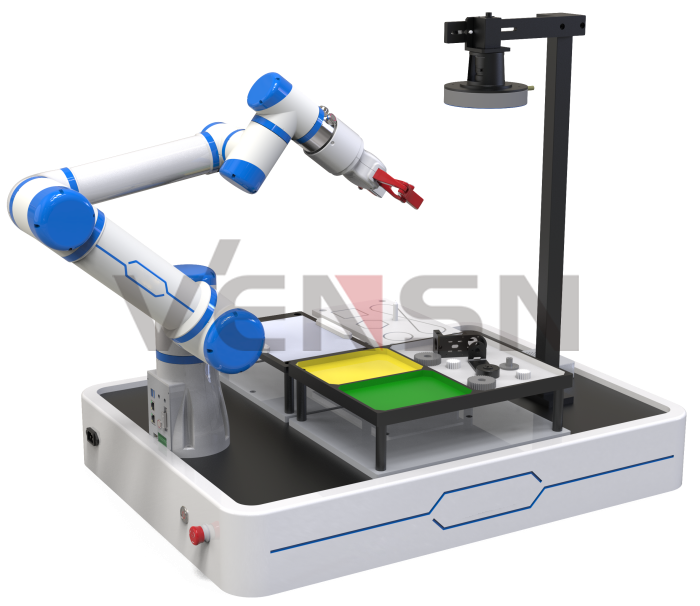
该平台以视觉系统和协作机器人为核心,通过在运算单元中部署人工智能软件环境,赋予机器人对环境的感知能力和协同工作能力,进而实现基于人工智能技术的视觉+机器人教学应用场景。平台集成了图像处理技术、机器视觉技术、机器人运动控制技术,可为人工智能、机器人工程、自动化等专业提供一体化软硬件系统和教学解决方案。另外,运算单元中实现了DeepSeek、Qwen等开源大模型的本地化部署,支持大模型技术开发、大模型+视觉、大模型+语音、大模型+机器人等多个行业场景的应用实践。
二、功能与应用场景
1.开放性实验环境
实验代码在Jupyter Notebook环境中编写。
2.开放全部源代码
开放全部软件框架和算法级源代码,支持二次开发,提供完善的实验指导书和技术文档,并提供产品相关软硬件的架构与设计方法文档。
3.部署本地大模型
完成了DeepSeek、Qwen等开源大模型的本地化部署,即部署于本机的运算单元中,除了可以开展大模型基础应用的学习外,还可以利用大模型和配置的视觉、语音、机器人、传感器等设备进行交互,面向如智能制造、智能家居、智慧农业等典型场景,开展应用实践。
4.视觉定位、检测与识别
视觉技术在实际应用中,通常有三个方向:定位(即计算目标位置,为机器人抓取提供引导)、检测(即检测目标的缺陷,如零部件划痕、缺角等,用于进行良次品分类)、识别(即识别目标的名称,如识别不同长度的螺杆,用于进行产品种类的分拣)。
本产品在不同的实训项目中,综合运用到了上述三类技术:可以通过视觉系统定位目标的位置,机器人准确抓取;也可以进行目标的缺陷检测,由机器人进行次品剔除;还可以进行目标的尺寸测量或型态识别,由机器人完成目标的分类。用户可以在开源环境下进行自主开发,面向智能制造、智慧物流等多个场景,开展行业应用。
5.机器人手眼标定
为机器人引入视觉系统,使得机器人可进行自主的、智能化的运动,完成如零部件分类、物流搬运、码垛、物体分拣等功能。
手眼标定有两种方式:眼在手上、眼在手外。通常来说,对大目标或大范围多个目标的抓取,需要更大的视野,可以采取眼在手外的方式;对小目标的抓取,则可以采用眼在手上的方式。当然,还需要考虑到机器人的负载和安装空间,是否在末端安装了视觉系统后,仍能实现对目标的抓取。本产品采用了眼在手外的方式。
6.基于视觉的机器人应用
机器人与视觉系统结合,可以对不同尺寸、外观的目标进行识别,开展目标分拣、智能码垛、物体识别、字符识别等多种人工智能基础实训项目。
三、主要硬件参数
1.运算单元
采用一台高性能计算机,预装Linux或Windows操作系统,部署DeepSeek、Qwen等开源大模型,并集成Python、OpenCV等运行环境,以及产品运行所需的全部软件框架和SDK,支持数字图像处理、机器视觉、机器人、大模型等硬件或应用的开发和学习。
2.机器视觉系统
机器视觉系统即一套标准工业级视觉系统,包括工业相机、镜头、LED光源、光源控制器等,通过视觉支架进行集成,安装于平台上方,为所有的静态目标检测、分析和处理提供实验的硬件环境。
3.协作机器人(完全开源)
该机器人是专为教育科研开发的一款产品,融合AI大模型技术,且完全开源,在电机控制上,开放电机、控制器与机器人关节之间的控制源码;在运动学算法上,开放底层运动学正逆解模型的源码。通过全方位的开源,用户可以从事机器人软硬件层面的各类科研、开发工作。
同时,机器人具有工业机器人的性能,提供多个拓展接口,支持视觉、语音、传感器等外设模块的接入,可应用于教学、科研、生产线集成、装配等领域。
4.实训与功能模块
该平台在功能设计上,既满足基础的机器人控制教学的需要,同时也满足视觉识别、手眼协同,以及更高层次的大模型+机器人应用的需求。
四、实验项目
1 Python程序设计
(1)数字类型、转换、运算
(2)Python运算符、内置函数、序列基本用法
(3)程序选择结构实验
(4)程序循环结构实验
(5)列表实验
(6)集合实验
(7)函数实验
(8)字符串实验
(9)正则表达式实验
(10)数据可视化
(11)Python的数据处理
(12)Python文件操作
(13)Python多进程
(14)Python多线程
(15)Python进程与线程的区别
(16)Python面向对象的理解
(17)Python类的使用与类的实例化
(18)Python实例化对象的使用
(19)Python类的继承使用
(20)基于Python的串口通讯
(21)基于Python的SocketTcp通讯
(22)基于Python的SocketUdp通讯
(23)基于Python的Modbus通讯
(24)PyQt5的环境搭建
(25)PyQt5的使用
(26)Qt Designer与PyUIC的使用
2 机器学习
(1)基于线性回归的波士顿房价预测
(2)基于K近邻算法的电影类型识别
(3)基于K均值算法的未知数据分类
(4)基于决策树的乳腺癌诊断
(5)AdaBoost电影数据集数据分类
(6)基于EM推理的双硬币抛掷模型验证
(7)基于朴素贝叶斯的垃圾邮件过滤
(8)基于随机森林的人脸识别系统设计
(9)基于支持向量机的动态行人检测
(10)基于深度学习的车道线检测系统设计
(11)基于CNN与SVM的交通标志的识别系统设计
(12)基于HOG与SVM的交通标志识别系统设计
3 深度学习
(1)线性回归建模与应用——房价预测实验
(2)神经网络的模型构建与应用——服装分类实验
(3)神经网络正则化——服装分类优化实验
(4)神经网络参数优化——非线性函数极小值寻找实验
(5)基于神经网络的模型构建与测试实验
(6)基于残差网络的优化模型设计
(7)神经网络优化器——手写数字识别
(8)文本分类——京东购物分类
(9)基于LeNet手写数字体识别系统设计
(10)基于RNN歌曲自动编曲设计
(11)基于深度学习的图像数据标注
(12)基于YOLOV5的目标检测模型训练
(13)基于YOLOV5的缺陷检测案例
4、数字图像处理
5、机器视觉
6、基于视觉的机器人应用
7、大模型技术基础
8、大模型+视觉应用案例
9、大模型+语音应用案例
五、综合实训
1.机器人的控制
2.AI+视觉自动仓储
3.基于AI的图象识别和抓取
4.机器人大模型调试与部署
5.具身智能技术开发与应用








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: