一、产品概述
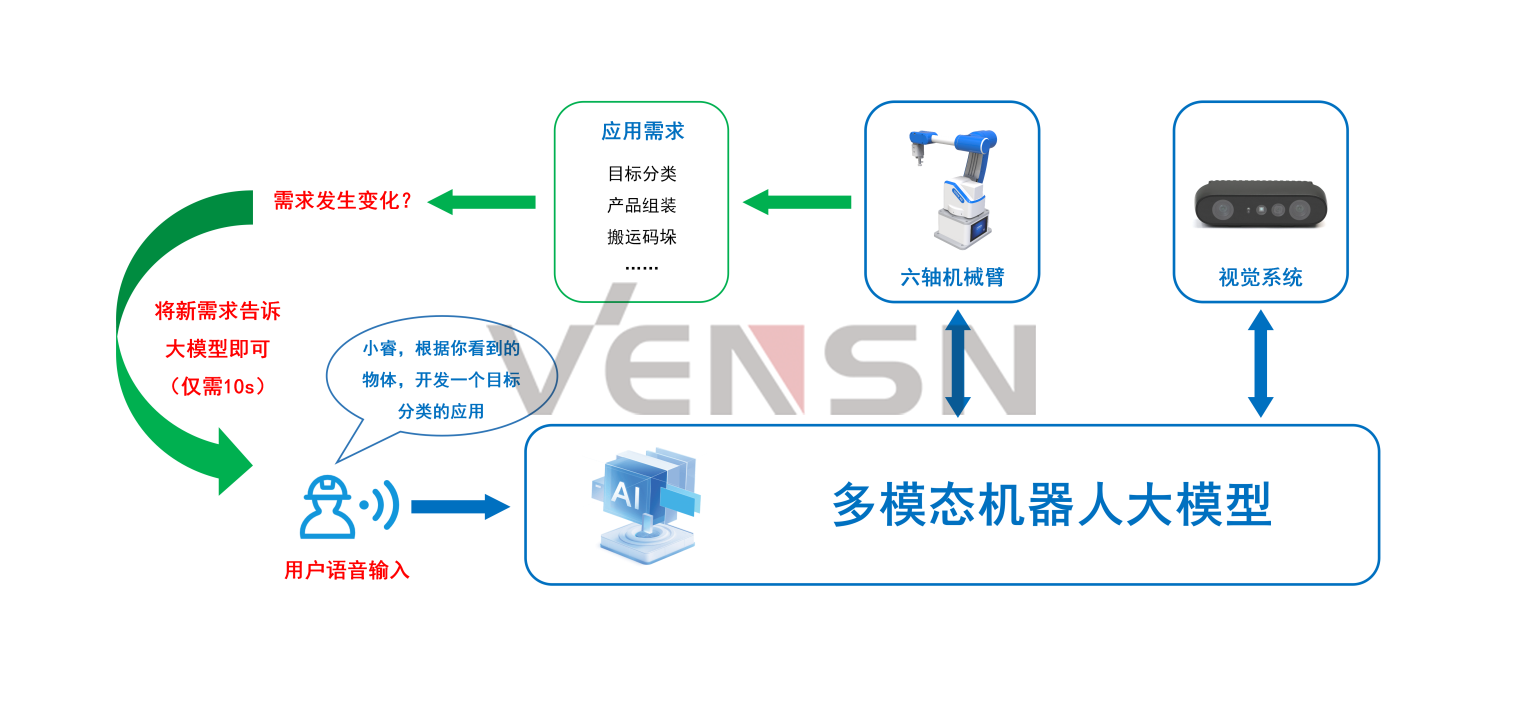
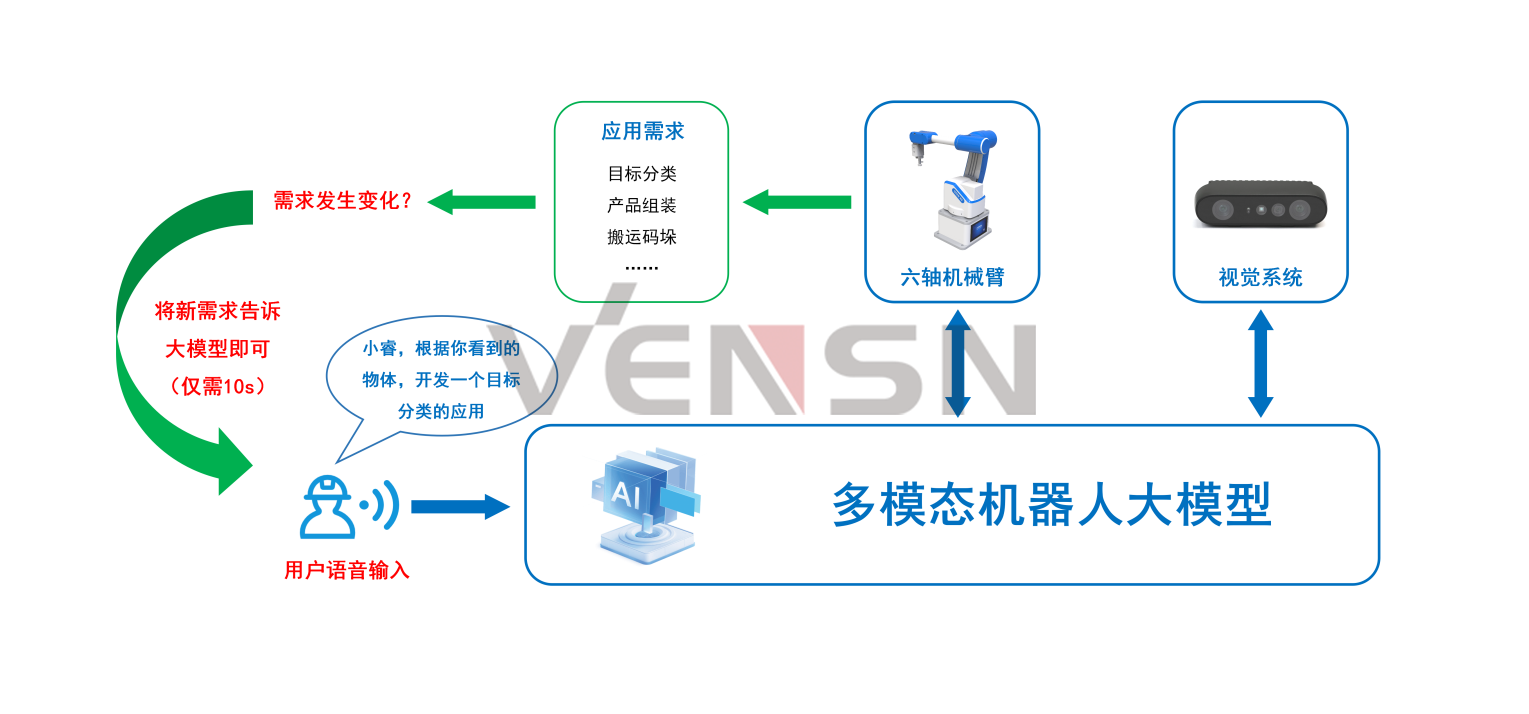
随着人工智能技术的飞速发展,特别是大模型(如深度学习模型、生成式AI等)的广泛应用,机器人领域正迎来一场前所未有的变革。大模型以其强大的数据处理能力、泛化能力和跨模态融合能力,为机器人提供了前所未有的智能水平。在这一背景下,研发了多模态机器人大模型与视觉协同系统,该系统以大模型为核心,以机器人为执行结构,以视觉系统为环境感知单元,可以快速地实现对多种应用需求的自主分析、理解和开发,可以有效的提高生产效率。同时,为有效的服务于用户的科研、开发等需求,该系统还开放大模型训练、部署的全部流程,并开放全部的机器人、视觉、语音的源代码,用户可以在此基础上,进行多个方向的探索和实践。
二、系统特点
1.机器人自主学习技术:通过AI大模型对机器人、视觉系统的SDK的学习和训练,使机械臂具备从视野环境和历史数据中快速学习新技能的能力,减少人工编程的重复性工作;
2.多模态协同优化技术:实现视觉、语音与机械臂动作的无缝对接,提升任务执行的精准度和效率;
3.推动智能制造升级:该系统可以为制造业提供更加智能化、自动化的生产解决方案,提高生产效率,降低人力成本,增强企业竞争力;
4.完全开放源代码:系统开放大模型训练、部署的全部流程,并开放全部的机器人、视觉、语音的源代码,用户可以在此基础上进行二次开发,实现技术创新和应用拓展。
三、产品功能
1.大模型驱动的自主编程
利用先进的大模型技术,如Transformer架构、强化学习、迁移学习等,使机械臂具备了自我学习能力,并根据历史数据和应用案例,自主编写代码、自主生成应用,自动优化任务执行策略。
2.多模态感知与交互
多模态,即多种感知能力与执行能力的融合。该系统在感知能力方面,具备语音交互能力(麦克风&扬声器)、指令解析能力(语音识别引擎)、环境感知能力(深度视觉系统),在执行能力方面,则采用全开源的桌面型六轴机械臂。因此,系统具备了物体识别、场景理解、人机对话、执行控制、机器人执行等一系列的功能。
3.灵活的任务规划与执行
基于多模态机器人大模型的学习和决策能力,机械臂能够自主地规划出最优路径,从而高效地执行各种复杂任务。包括零部件的分类、产品的组装以及其他操作。通过大模型内置的算法和深度学习技术,机械臂能够在视觉系统的协同下,实时分析环境数据,识别不同的物体,并根据预设的目标和任务要求,制定出最合适的路径方案。
四、应用与科研价值
1.教育与科研机构
对于高校、研究所等教育机构而言,该系统可以作为人工智能、机器人技术教学和科研实验的重要工具。通过完全开放的AI大模型训练、部署流程,以及机器人、视觉、语音等完整的源代码,用户可以结合自己的场景需求,重新训练并生成其他的大模型,并应用于该新的场景。通过该模式,可以产出各类高质量的论文和科研成果。
2.工业制造企业
对于工业制造企业而言,该系统能够实时接受用户输入的各类生产需求,并基于深度学习算法进行精准分析和决策,最终生成可以直接执行的应用代码,从而极大的降低部署成本,提升市场竞争力。
3.家庭与个人用户
在家庭与个人用户方面,多种智能化的机器人正逐步成为生活的重要组成部分。该系统通过集成语音识别、深度视觉、机器人等多种技术,能够与用户进行流畅的交互和沟通,完成丰富的辅助性任务。可以预见的是,采用了多模态大模型的智能机器人,有望在未来成为每个家庭不可或缺的智能助手。








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: