|
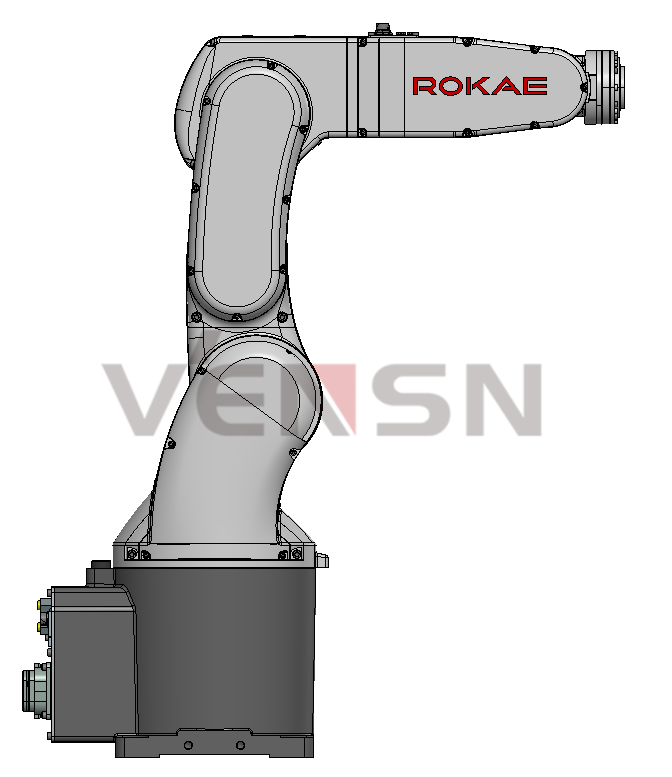
工业机器人本体
1) ★六自由度串联关节型工业机器人。
2) ★手腕负载4kg。
3) ★最大臂展596mm。
4) 本体重量32kg。
5) 重复定位精度±0.02mm。
6) 手腕设有8路集成信号源,4路集成气源
7) 各关节最大运行速度为,1轴440°/s,2轴355°/s,3轴440°/s,4轴490°/s,5轴450°/s,6轴720°/s。
7) 各关节工作角度范围为,1轴±170°,2轴+144°~-80°,3轴+54°~-194°,4轴±170°,5轴±119°,6轴±360°。
8) 手腕允许最大负载力矩为,4轴4.59Nm,5轴4.59Nm,6轴3.1Nm。
9) 手腕允许最大负载惯量为,4轴0.2kgm2,5轴0.2 kgm2,6轴0.08 kgm2。
11) 驱动组件采用高性能伺服电机,所有部件已安装到本体上。
12)各轴均采用谐波减速器,已安装到本体上。
工业机器人控制系统
1)供电为220V交流电,50HZ。
2)运动控制方面:控制器以全动力学模型为基础,拥有OptiMotion、TrueMotion、SafeMotion、SoftMotion等关键技术,可大幅缩短节拍时间、提高路径精度,机器人保证在不同速度下运动轨迹均一致。
3)xPad示教器显示器参数:TFT 9.7-inch LCD 1024*768,急停按钮、模式选择钥匙开关(自动、手动),一个USB2.0外部接口,防护等级IP65。
4)提供完备的电路保护,包括安全开关、紧急停止、过载保护等。
5)通信:支持先进的EtherCAT、ProfiNET、Ethernet / IP等。
6) 工业机器人控制系统所有低压电器元器件安装在展柜式控制台上,高压电器元器件布置在柜体内。
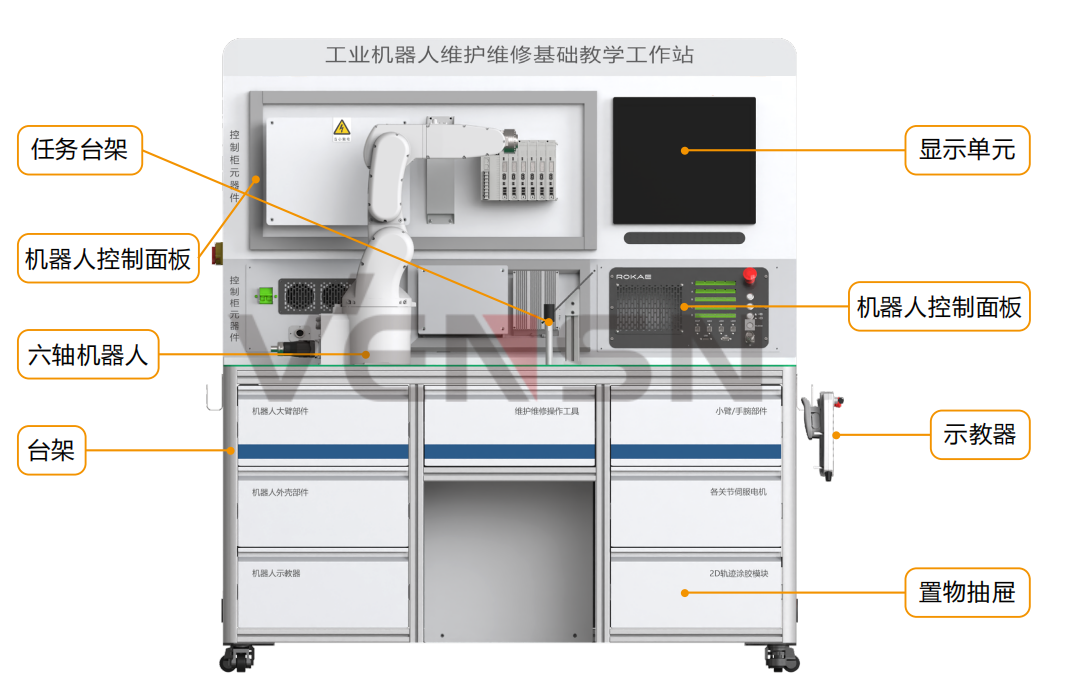
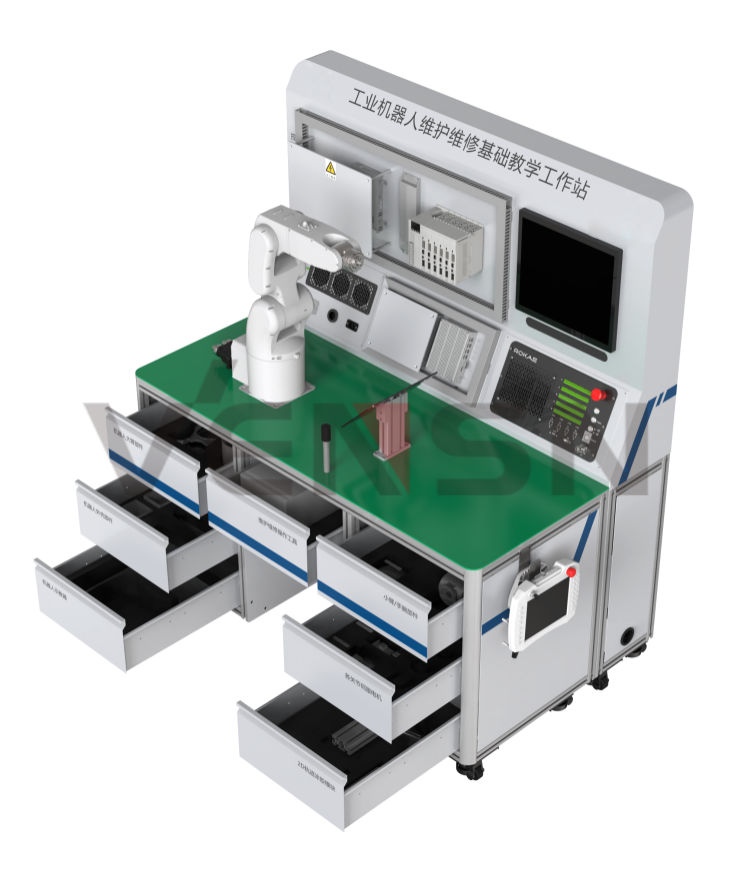
设备台架
此设备为单站形式,所有组件均集成在设备台架上。
铝合金型材框架,台面为8mm铝板,具有强度高,重量轻等特点。
3) 整体尺寸1600mm长×宽930mm×高1760mm。
4) 台架中间安装有抽屉,用于放置维护维修操作工具,功能调试配套工具,和拆卸下来的零部件。
5) 底部安装有福马脚轮,方便移动和固定。
6) 机器人控制柜拆分装在钣金壳体上,可直观、明了、全面观察控制柜结构与原理。
1)操作工具包括:内六角扳手组1套;万用表1个;工具若干。
2)17寸工具箱,收纳工具。
涂胶、TCP校准功能单元
涂胶、TCP校准功能单元,训练分为平面轨迹训练和TCP校准训练。
平面轨迹上有不同的图形,可实现不同路径。通过型材连接到台面上。
3)提供工具TCP参数标定用尖锥,材质镀铬光轴,通过螺纹固定在设备台面上。
4)TCP校准工具,材质光轴配合工装,可装在机器人的末端。通过此工具可实现机器人快速校准。
配套离线编程软件×1
1) 正版软件,可提供持续的中文技术支持服务、软件可使用所有功能模块。
2) 包含与“工业机器人维护维修基础教学工作站”硬件平台一致的三维模型环境,可直接从离线编程软件中调用,方便教学、训练。
3) 采用通用3D技术,与CAD教学衔接,支持3D CAD系统的模型文件导入,可通过三维球功能对模型进行平移、旋转操作。
4) ★轨迹生成基于CAD数据,简化轨迹生成过程,提高精度,可利用实体模型、曲面或曲线直接生成运动轨迹。
5) 包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限功能。
6) 包含涂胶和码垛工艺包,可以方便的完成复杂轨迹涂胶和物料的码垛拆垛工序编程。
7) 支持工具快换功能,可以方便的仿真并输出工业机器人对工具快换系统的操作,扩展工业机器人应用范围,使工业机器人可以在涂胶工具和夹爪工具间自由切换。
|









 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: